
FRC 2473
Applications for the 2024-2025 school year are closed!
What is 2473?
2473 was founded in 2007 by just 7 students with the desire to learn how to build a robot. Today, the team has grown to over 50 students divided into several sub-teams that work together, constructing a complex robot by the end of each season.
The sub-teams this year include Hardware and Software, which are responsible for designing the robot; Pit Design, which is in charge of designing a functional and engaging 10x10x10 pit where we repair the robot and talk to judges; Team Branding, which designs elements that we bring to a competition to display and share our team brand; and Awards, which writes essays for the competition season.
Season Timeline:
Summer Training: Two hour meetings twice per week throughout the summer
Offseason: August - December
Season Kick-off: First week of January
Tournaments: Two in March
Last team meeting: week after the last tournament
Dusty XVI - Charged Up
In the challenge Crescendo, robots work together to score notes, amplify a speaker, harmonize on stage, and take the spotlight. During the autonomous period, notes scored in the speaker earn their alliance 5 points, and notes scored in the amp score 2 points. Robots can also earn 2 points through mobility by leaving the starting zone. During the tele-op period, notes scored in the amp are 1 point while notes scored in the speaker are 2 points. Each note scored in the speaker when amplified is worth 5 points. To amplify the speaker, alliances must score 2 notes in the amp and the human player must press the amp button. The amplification period lasts 10 seconds or until 4 notes are scored in that alliance’s speaker, whichever occurs first. Once it’s the endgame, the last 30 seconds of the match, robots can choose to keep scoring elements or try to climb onstage and score in the trap for 5 points. During the endgame, human players may also attempt to throw notes on the microphones. If they score, the alliance receives the spotlight bonus which gives them 4 points for each robot onstage whereas an alliance that is not spotlit would earn only 3. If two robots from an alliance are onstage on the same chain the alliance earns the harmony bonus of 2 points. 1 point is awarded to any robot parked in the stage zone.
Awards
The Awards team worked to complete the essays for the Chairman’s Essay. We worked to compile the achievements and contributions Cupertino Robotics and 2473 made. Through a written, video, and presentation format, the Awards team was essential in formally showcasing 2473 to the competition judges.
Pit Design
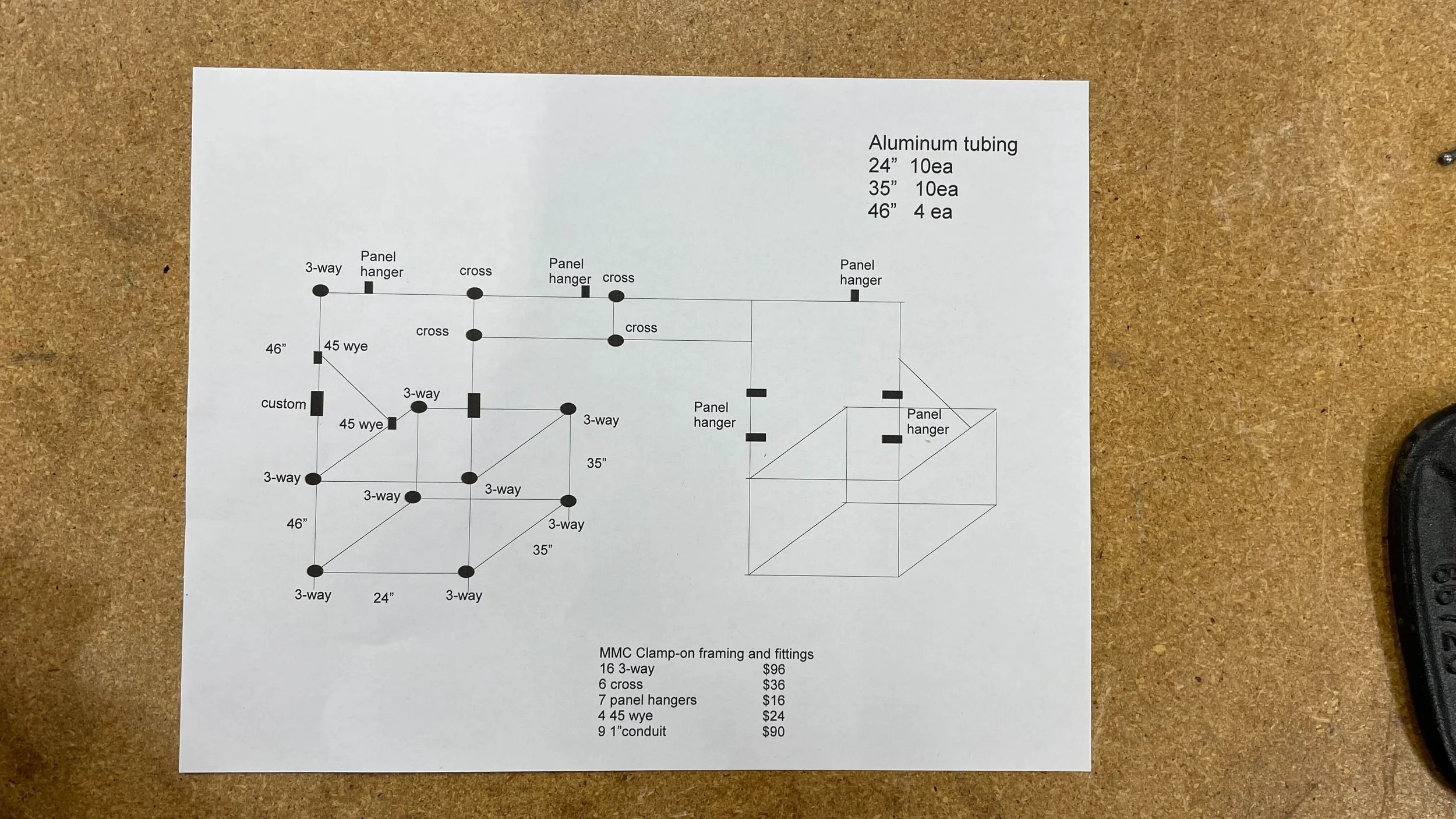
The Pit team worked on creating a functional and utilitarian pit. This pit, designed for making quick fixes to the robot with ease, has shelving of tools and parts lining the perimeter of the pit and a back table to store robot parts and make any fixes to the robot code. Moreover, the pit was designed with transportability in mind, pushing us to use cage construction rods as the structure of our pit. This was done so we could easily assemble and disassemble the pit. Additionally, the pit team worked on the robot cart this year, revamping last year’s trolley by redesigning and painting. With the help of the Branding team, the Pit team hung up music notes and lights around the pit and installed our custom Goldstrikers neon sign along with a new outreach banner and interactive button TV display. The button-controlled TV display was built and installed to bring an interactive feature to the pit.



Team Branding
The branding team works on the spirit and aesthetics during the season. We worked closely with the pit team to decorate the pit by hanging lightning bolts on fairy lights over the pit, as well as a crank that powers a custom neon sign at the front of the pit. We also set up a vertical TV to display a slideshow of our season. Additionally, branding created the audience signs of our team numbers. We also designed the team t-shirts and gave out red bucket hats and bracelets. The robot sponsor plates also fall under branding.



Achievements
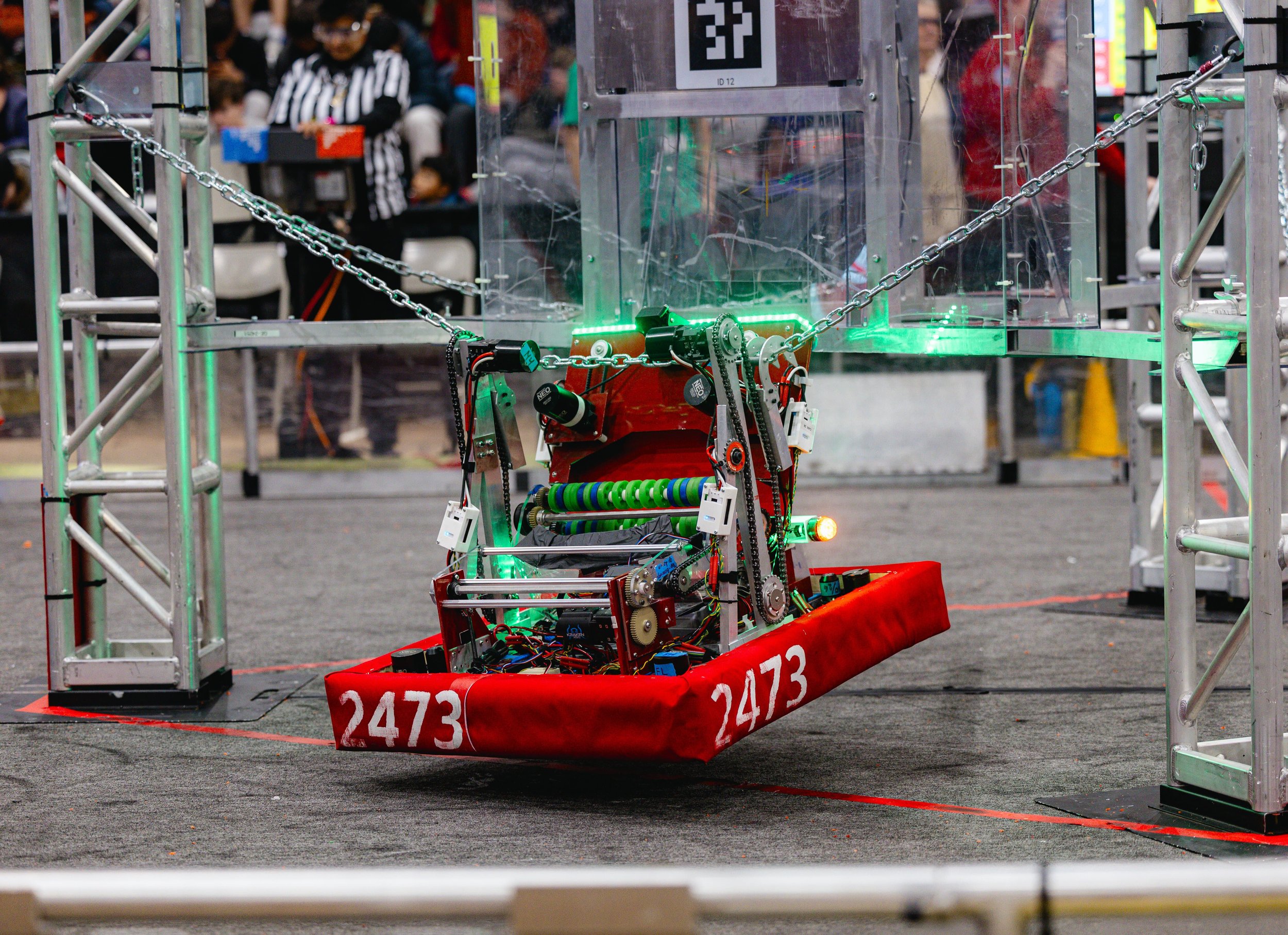
Ending the 2024 season strong, Team 2473 reached playoffs at the Silicon Valley Regional as captains of the fourth alliance and played as part of the eighth alliance during playoffs at the Monterey Bay Regional.

Interested in Joining? - FAQ
Q: What is FRC?
A: First Robotics Competition (FRC) is the senior most league offered by FIRST. At Cupertino Robotics we have a single team: The Goldstrikers (2473). Our team consists of both students of all years and is great for students with all ranges of experience.
Q: How long is the build season? And what does it look like?
A: For FRC the primary season starts around the second week of January and runs for approximately 3 - 4 months. During the first two months, we do a lot of the building and coding for the robot. During these two months, we utilize our critical thinking and teamwork to build a competitive robot to participate in the competitions which follow.
Q: How long would I need to commit?
A: At Cupertino Robotics the FRC season begins around October. For the first 3 months, we work on getting to know one another and getting accustomed to the materials and we train by developing products from previous seasons. During these 3 months, we meet twice a week for around 2 hours. Once the season starts in January you will be expected to make a larger commitment to meetings occurring for 2 hours 6 days a week, however, if you are unable to make all the meetings you can still participate as long as you communicate with the team.