
Meet Dusty XV
Check out the 2022 Robot Reveal:
Our Strategy:
Autonomous: 3 balls into the lower hub earning up 6 points
Teleop: score balls into the lower hub by using the terminal and human player to get the ball onto the robot. Usually we earn around 4-5 points during this period.
Endgame: if we have any balls still on the robot, score them (1 - 2 points). Hang on the lower rung earning us 4 points.
Rapid React
In the challenge Rapid React, robots have the choice of scoring cargo, big tennis balls, into a lower hub or a upper hub. During the autonomous period, cargo scored in the lower hub earns their alliance 2 points and cargo scored in the upper hub is 4 points. During the teleope period, cargo scored in the lower hub is 1 point and cargo scored in the upper hub is 2 points. Once it's endgame, the last 30 seconds of the match, robots can chose to keep scoring points or hang on one of the rungs. At the end of the match if the robot is hanging on the low rung, their alliance gets 4 points, middle rung is 6 points, the high rung is 10 points, and the traversal is 15 points.
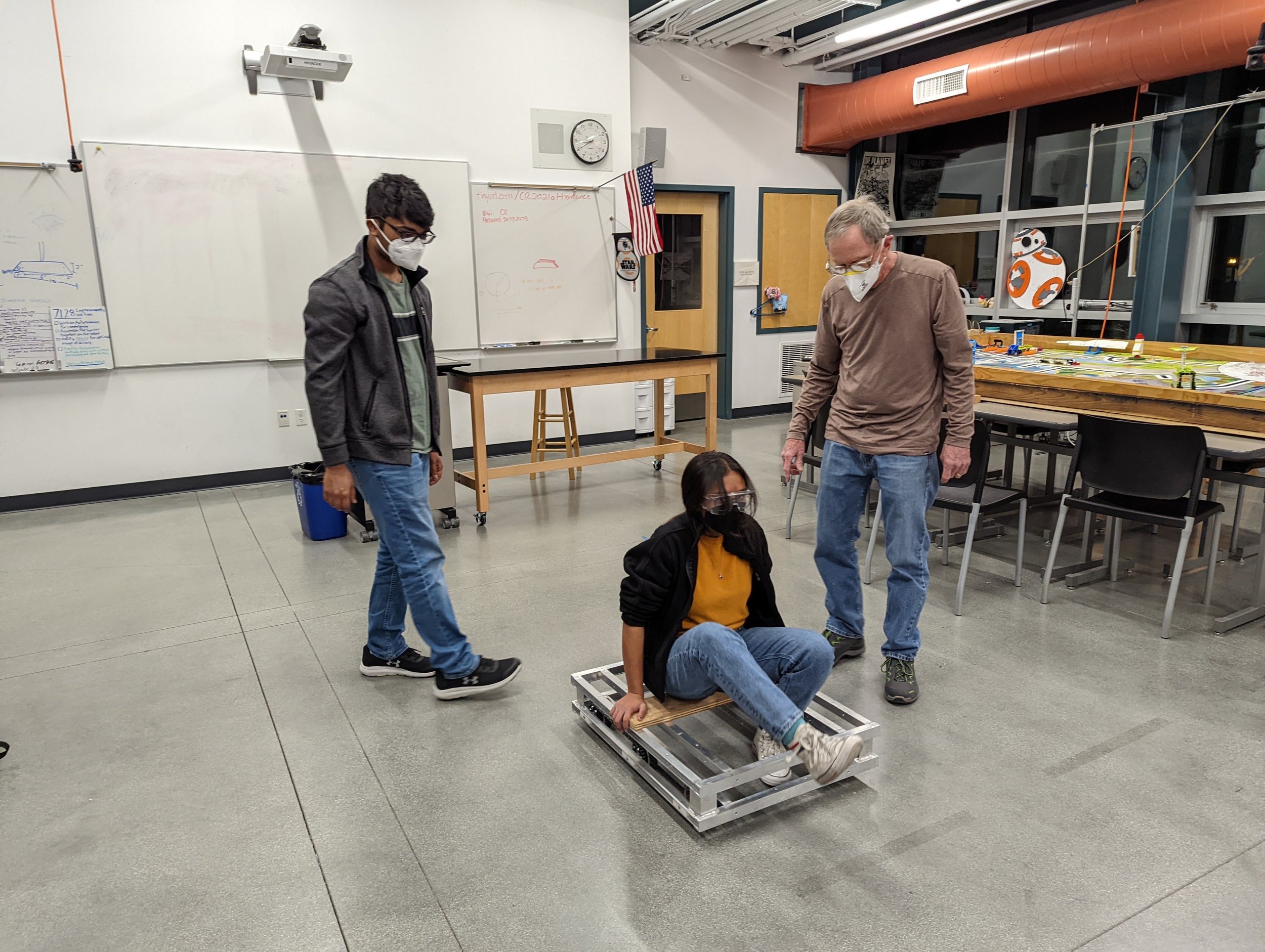
CHassis
2473 worked with a 6 Wheel Western Drive and a 30x24in Chassis. We selected a Western Drive because we decided that we wanted to prioritize speed in the challenge because of our usage of the human player in loading the robot. Additionally, we wanted a smaller size chassis, especially in width, with consideration for the hanging challenge and cooperation with other teams.


Ball Manipulation
Our Hardware Blue Mechanism Subteam focused on obtaining balls from the field and scoring them. Our intake mechanism consists of a frame and a roller that traps the ball just outside the chassis and lifts it up. The robot can then easily drive to the terminal area and deliver the ball to the human player, who loads the it onto the ramp. The ramp consists of a forward slanting plate and three walls to contain the ball, along with a flap that falls down at the beginning of the match, extending our ramp to reach the terminal. At the front end of the ramp is a circular opening. Below this is a circular puck attached to a piston. Once in position, a driver can fire the piston which will shoot up through the opening and launch the ball over the front wall to score it in the lower hub.

Climbing
This season, the Hardware Red focused on building our team's hangar mechanism. We decided to build a passive mechanism, using a hook to latch onto the rung. By having our hook be a small amount taller than the rung, we could simply drive straight and slide onto the rung without needing any additional motors or actuators.
Drive Code
Our robot’s mechanism code utilizes the practices behind Finite State Machines (FSMs) in order to give our drivers an optimally consistent, and driver-friendly robot. Robot drivers, in the heat of a match, require a robot that is as simple and streamlined as possible, in order to focus on the challenges of a game that only a human player can navigate, hence, our software team placed immense focus on the automation and simplification of all of our drivers’ controls. For example, our intake mechanism, which focuses on collecting cargo in order to transport it to the terminal, utilizes a singular motor and roller in order to collect and transport cargo. Our intake mechanism only requires a singular button input from the drivers to release the cargo into the terminal, and all other functions of the intake, including intaking and maintaining possession of the ball, and protecting the physical mechanism from reckless damage, are done autonomously through software and sensors. Through various other systems, safety-checks, and automated functions implemented in software, our team produced a robot that is both very driver friendly, and performatively consistent.


Computer Vision
This year, the CV team’s job was to calculate the distance and angle to a ball in real time. We first blurred the image to minimize background noise. Then, we mask the image, making it black and white, based on either the color red or blue. After that, we find the x and y coordinates of the ball. This is used to find the angle of the ball. Finally, the distance is calculated based on the area of the ball in the image. It took extensive testing to fine-tune our code, but in the end, we succeeded and were able to track a ball up to 5 feet away and make the robot automatically drive to it.
Our next steps
We are currently working on making the mechanisms on our robot more efficient to reduce the total time it takes to score a point, while still maintaining accuracy. Our mechanism teams are designing an intake that can directly take cargo from the ground and transport it to the shooter. We are designing an intake mechanism that pushes out with a piston and takes cargo using wheels. The cargo will then be stored inside the robot until we are ready to shoot. While we haven’t designed it yet, we would like to build a shooter that shoots cargo into the upper hub, scoring more points.
