
FTC 7610

Team 7610 - Unhinged Koalas
Team 7610, the Unhinged Koalas, is a team of two freshmen and eight sophomores. Since the beginning of the season, the second years on our team, Oliver, Shalika, Pragya, Gautam, and Eera, have kept a goal in mind: we wanted to improve from last season and help our first years have a great FTC experience. We felt that using FIRST as a way to get experience as a roboticist and get hints at the engineering process was a perfect opportunity for us to be able to not only build robots but also build people. An example of this is one of our biggest commitments in Cupertino Robotics FTC is Summer Training, where we teach first years the core values of gracious professionalism and coopertition, as well as technical skills needed on a robotics team. Our team is made up of two primary subteams: software and hardware. At every meeting, we set goals to complete for the day and work towards them. The software pairs up first and second years to ensure everyone is on the same page and working together. We explored the value of cooperation as the teams this year weren’t quite balanced. As a more experienced team, we went around and helped other teams with less trained individuals, which was a challenge when managing our time. We spent quite a lot of time assisting teams with CAD models alongside debugging other teams’ code. The most exciting part of this season was the Bellarmine Norcal qualifiers, where we were the only FTC team from Cupertino High to qualify in the semifinals. It felt amazing to see the fruits of our hard work throughout the whole season!
Robot
Key Parts/Mechanisms of the Robot:
Mecanum Wheels (Movement)
Allows for movement in 4 possible directions: forward, backward, strafe left, strafe right
Double Joint Arm
Allows for two-dimensional movement which allows further control of pixel placement and driver possibilities.
Claw (Allows for pixel movement)
One servo mechanism along with 3D printed claws in order to transport the pixel to the backstage.
Hardware
At the start of the season, our goal was to get all hardware members trained on our CAD platform and 3DExperience, and then to proceed to building the robot. However, we had difficulties getting everyone on the platform and communicating our needs due to its headquarters being overseas. Ultimately, most initial designs were whiteboard drawings, which led to numerous rebuilds of important mechanisms.
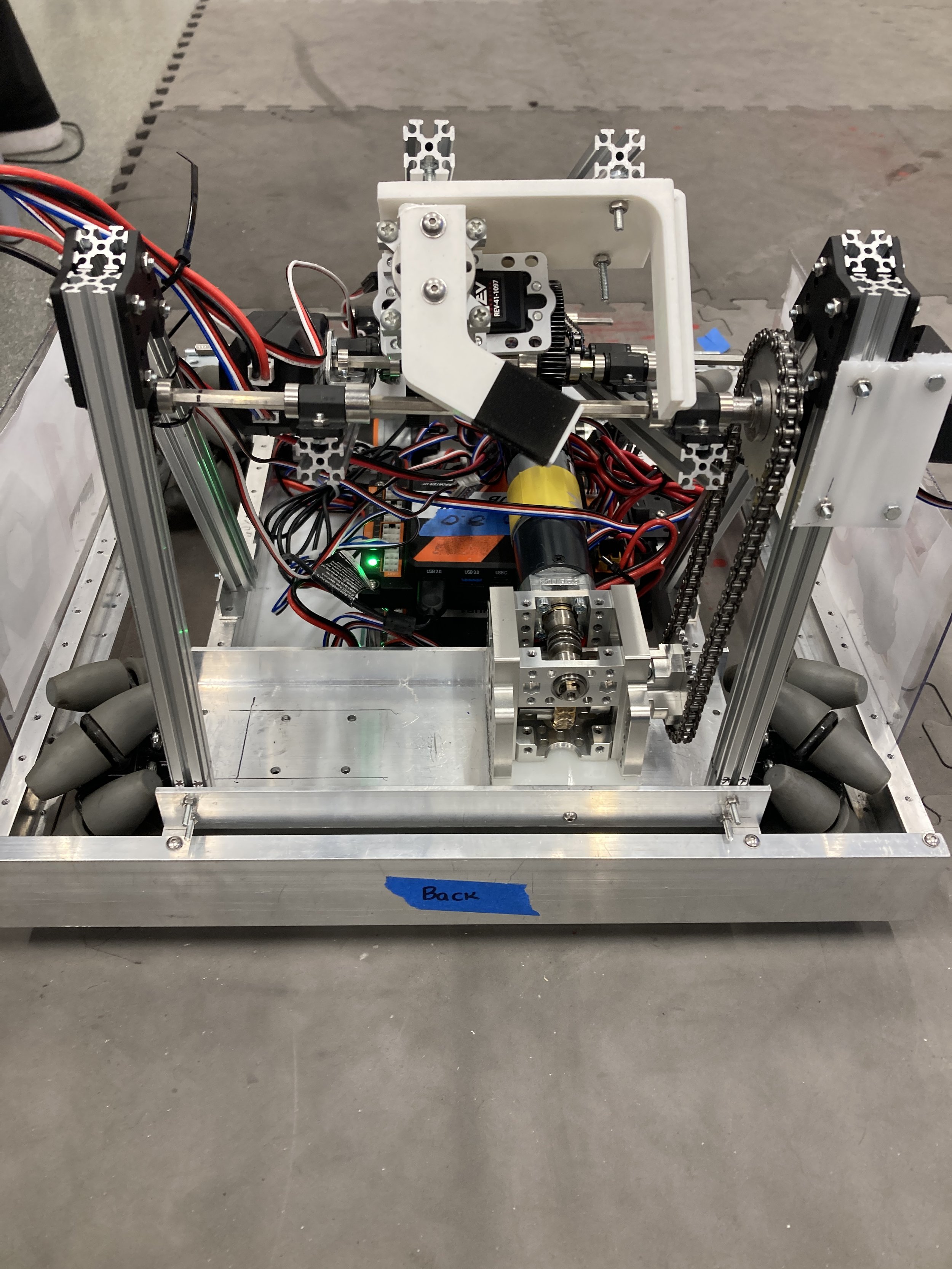
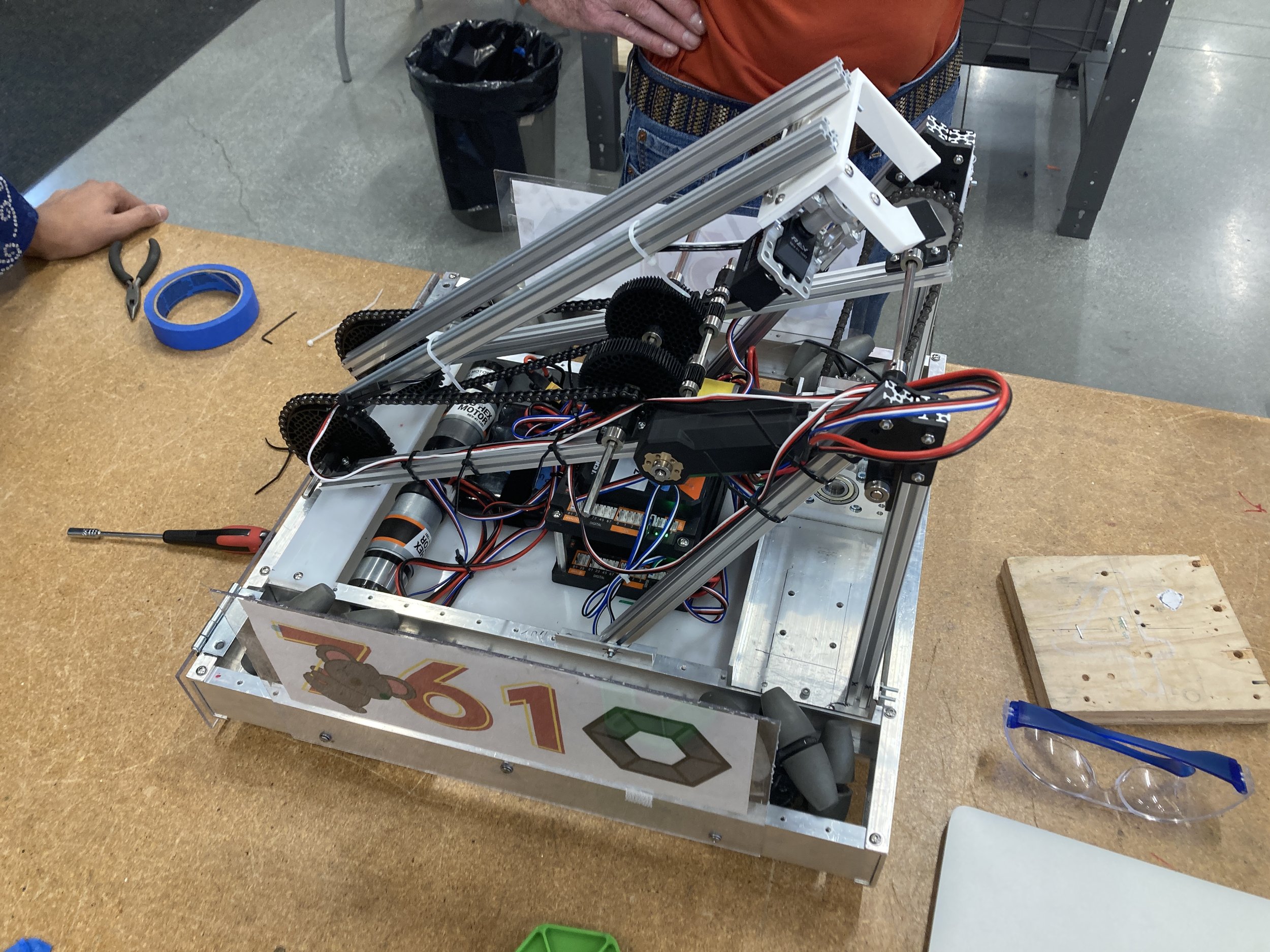
We chose a mecanum chassis for its maneuverability, made it a closed chassis to prevent warping of the u-channels, and made it 16” x 17” for the wheels to be in a square. Our chassis was able to be quickly built so that the chassis subteam could move on to designing mechanisms for the robot.
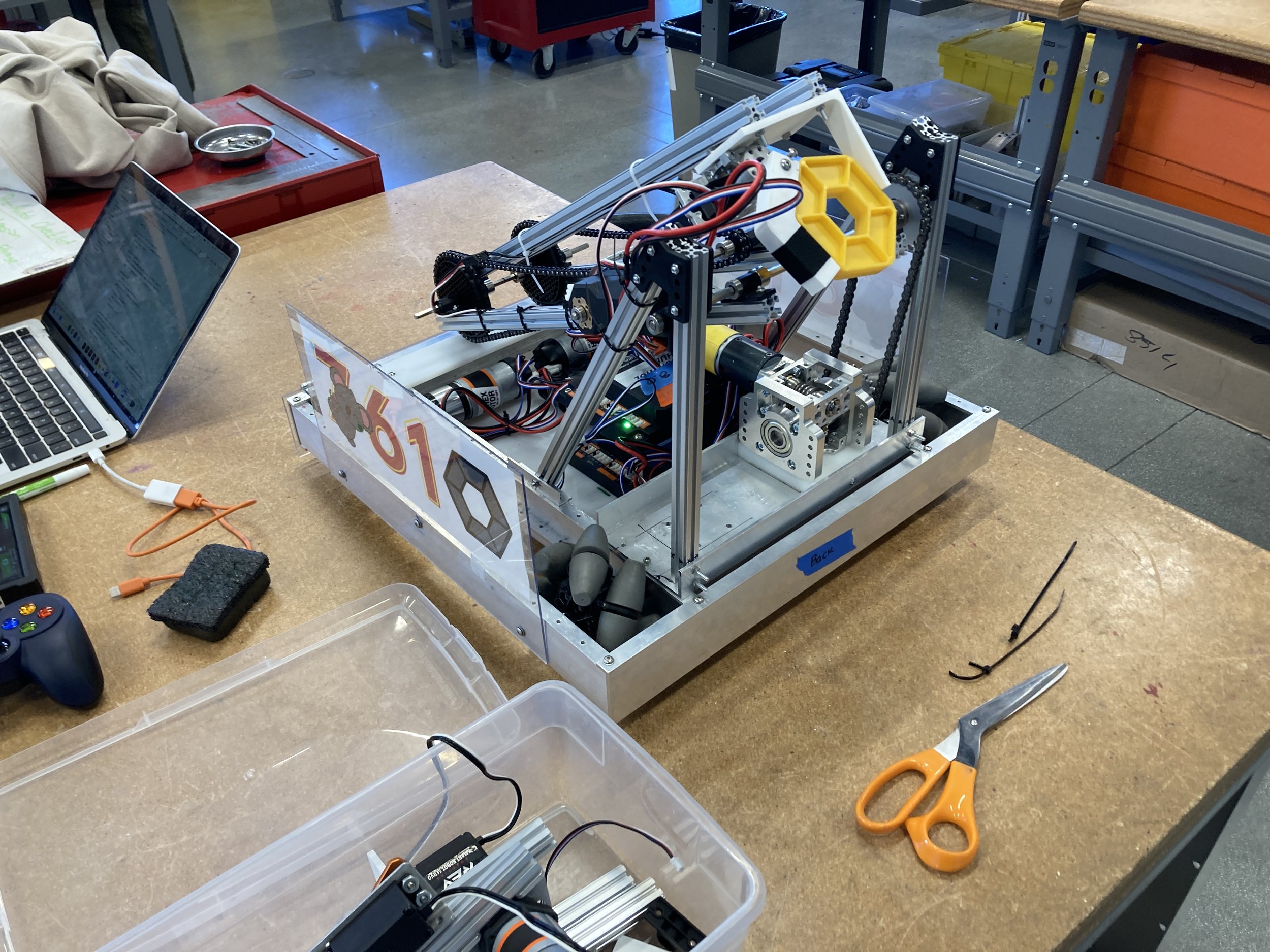
A key part of our robot is our double-jointed arm, which includes a goBILDA 5203 series motor for the first level and a REV Core Hex motor for the second. The arm is supported by a triangular extrusion which assists in providing the necessary height for the backdrop. When folded down, the arm fits under the height limiting bars.
On the end of the second level of the arm is our 3D-printed claw, consisting of one fixed part and one moving part. One difficulty we encountered with the claw was having it able to pick up from the field tiles.To remedy this issue, we added a ledge to prop up the claw against the arm, so that it is able to pick up pixels from the floor.
In the coming weeks, we plan on mounting our drone launcher and optimizing our arm and claw.
software
Before the season began, we went through training to assure that the first years could understand the concepts of moving servos, rotational apparatus, and more. We partnered up first years with second years to ensure we can all share skills. The first years had a great experience learning with the second years assistance in mini-lectures and whiteboard work. They learned how to innovate solutions, write servo code to make TensorFlow models and maintain gracious professionalism.
Autonomous 1.0 focused on moving forward and pushing 2 pixels to the backdrop area, as we didn’t have a functional arm, and parking. Our autonomous 2.0, still a work in progress, focuses on implementing CV ideals to scan our custom game element using a TensorFlow model, placing a pixel, and parking. Challenges we faced mostly included CV as we had to combine the custom prop with the robot’s movements t, which resulted in lots of last-minute problems. To solve these issues, we asked our FRC team for help. They host an annual CV workshop explaining TensorFlow models and custom element detection. They also went over scanning April tags. We also had FRC members work one-on-one with our team members to help debug code.
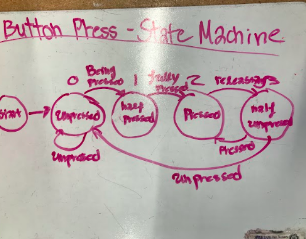
The Teleop code implemented similar ideas to last year. We used exponential power for the wheels for the joysticks. In addition, we used the joysticks for rotational movement. Bumpers were mainly used for strafing. The arm is currently controlled simply by two joysticks. In the future, we would like to implement a state machine to more easily and smoothly operate the arm.
Overall, we emphasized teamwork and had fun learning!

Outreach


FTC SUMMER TRAINING 2023
The second years orchestrated FTC Summer Training, a session we held before the start of the next school year to train the incoming freshmen before kickoff. It took a lot of effort to plan and collectively train them to accompany basic hardware and software skills and FIRST activities that really engage the newcomers.
It was different from the previous year as Mr. Williams recommended us to use hands-on activities, as opposed to the lecture-based lessons from last year. Pragya led Summer Training with the help of Oliver and Shalika, who served as corresponding leads for software and hardware. We cooperated with the other second-year members in order to pull this event off! We’re incredibly proud of our results.
ARTEMIS MENTORING
Pragya, Shalika, Hiyab, and Chetana served as Artemis mentors in our team.
We introduced female and non-binary people to our realm of robotics. We taught them skills such as CADing simple projects and learning coding with educative.io. We plan to give them a head-start on opportunities such as FTC, FRC, and FLL. They even got a chance to drive FTC bots!
FLL MENTORING
Oliver and Gautam served as two FLL teams composed of students from local middle schools.
They taught middle schoolers from Python and helped them build a LEGO robot to play in their season’s game, MASTERPIECE.
COLLEGE PANEL EVENT
Pragya hosted the College Panel Event with UCSC Slugbotics and Northeastern Robotics through the Outreach Subteam in Cupertino Robotics.
We introduced other Bay Area FTC and FRC Teams to a possible future in the realm of robotics. Specifically, we had the Goldstrikers, the Cupertino High FRC team, and South Bay Robotics on our zoom call. We had the colleges discuss their experience and their opportunities along with an interactive Q&A session.
FUN FEST IN MEMORIAL PARK
Chetana volunteered at the Fun Fest event @Cupertino’s Memorial Park which consisted of spreading information to the community about FIRST core values and what Cupertino Robotics is truly about.
We had an amazing time talking to people at our booths and informing both kids and adults curious about Cupertino Robotics and who we are. It was a wonderful experience, teaching younger children, adults, and others about how to drive FTC robots from last year’s POWERPLAY tournament and watching their expressions when the robot moved all by itself with the help of a small push of their finger. At the end of the day, everyone had tons of fun and learned new things!